
Author: Aldux
Glitch in the system!
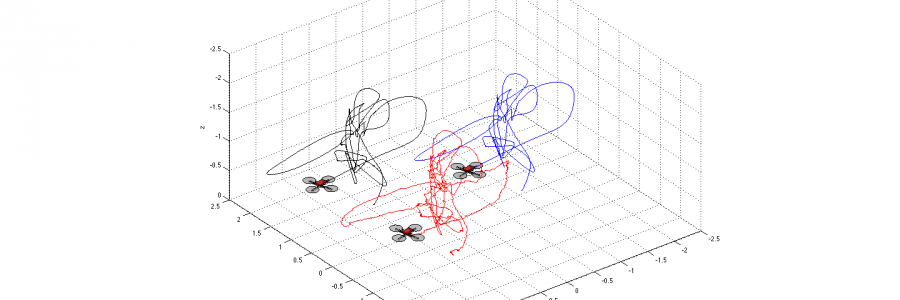
I’m in the current process of training my ESN using real data coming from the tuple
('raspberry pi', ',multiWii', 'matlab-simulink', 'MoCap')
But, as usual, there is problems… What can you expect? nothing is perfect.
My current hypothesis is that the rpi is losing wifi connection for a very short period of time, causing the python code to save ‘garbage data’ that then Matlab interprets it a NaN (not a number)… and ergo the glitches.
Thats why I’m asking to the IT guys at my university if they can put a special router only for the MAST Lab… lets see if they deliver.
Pro Tip: Do not use EDURAM for sending/receiving at high rates UDP packages… or the gods of the glitches will punish you.


AlduxHexa
The “Big boy“…
Able to carry 4kg of payload and still fly for 10 min. Very fun to fly, very dangerous.
- 740kv, 550watts Multistar motors.
- 13 in carbon fiber props, t-style
- 30amps simonk ESC
- APM, PX4 and Pixhawk being tested on this frame
- Tarot 680 carbon fiber frame
Endurance tests (new…):
- 8000 mah 4s 10C Lipo (brand new battery) -> 21:47 minutes
- 5000 mah 4s 45-90C Lipo (used battery) -> 10:53 minutes











Videos:
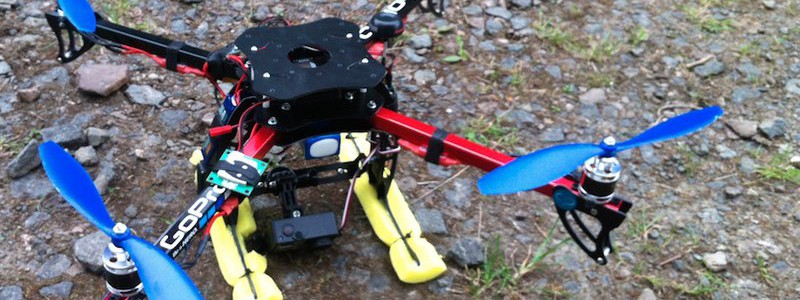
AlduxQuad
This was my second quadcopter build, but first one documented… The post is here.
Built for fun and to learn to fly a quadcopter. More than capable to carry a GoPro.
Specs:
- Motors: Turnigy Aerodrive 940kv
- Props: 10 x 4.5 SF
- Flight controller: APM
- ESC: 25 amps Turnigy
- Frame: 500mm from rotor to rotor, aluminium
Current configuration:
- APM 2.5 (upgradable and reprogrammable, original, not clone)
- GPS uBlox with 3D printed case for extra protection (color red), excellent waypoint navigation
- Voltage / Current sensor connected to the APM
- Extra visible navigation LED stripes (blue for forward and red indicates back)
- Turnigy 9x RX / TX (1000 meters range in LOS)
- 3D printed anti-vibration mount for the flight controller (providing excellent loiter)
- Runs great on 2200 mAh LiPo batteries (10 min flight times)
Current pics:






Some extra pics:




And some videos made with this vehicle:

AlduxTri
A tricopter is similar to a helicopter except that it has three vertical rotors as opposed to a helicopter one.

The basic design of a tricopter includes three motors, one of which is vectored.
Components
The drive system should be configured to provide the highest amount of “thrust resolution” possible. In this context, thrust resolution means the amount of increase or decrease in thrust produced as as the transmitter or gyro instructs the ESC to change power to the motor. A higher resolution (smaller changes) allows the tricopter to make minor adjustments and fly smoother.
Motors
The lower the kv rating, the higher the thrust resolution. Motors under 1000kv are ideal for tricopters.

ESC
Three ESCs are required, one for each motor. The throttle of each ESC is controlled by a separate channel and has a gyro between the receiver and the ESC. This allows the tricopter to become stabilised by varying the speed of each motor individually.
Some ESCs have finer resolution when instructing the motor to change speeds. There is no documentation for this and has been found through trial and error. Please see the Successful Combos section when selecting ESCs.
Propellers
The effect propellers have on thrust resolution comes by virtue of their pitch and weight. Low pitch and low weight propellors provide the highest thrust resolution.





Videos:
https://vimeo.com/78837673
TEGO v1
First 300 class quadrotor
This was built with the idea to be use inside the MAST Lab, and is still being used. This first version was a frame bought in hobbyking.
- 5 x 3 props
- 1800 kv Turnigy motors
- Glass fiber precutted frame (easily broken)
- Flight controller: Multiwii (several boards tested)




Videos:

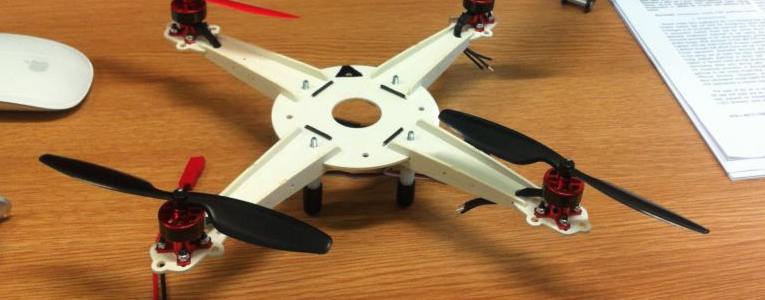
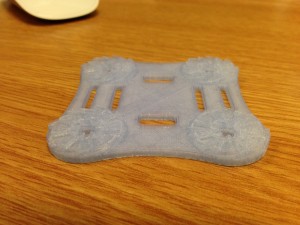
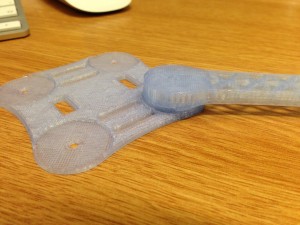
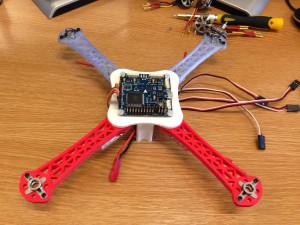
TEGO v2
First 3D printed quadrotor, very very similar to TEGO 1, same motors and ESC, just different frame. First one to be flow with the computer, making use of the multiwii serial protocol, and a computer joystick. The post is here.
- 1900kv turnigy motors
- 10amps ESC
- FC multiwii
- 5×3 props
- 3D printed frame 250 mm rotor to rotor


Videos:

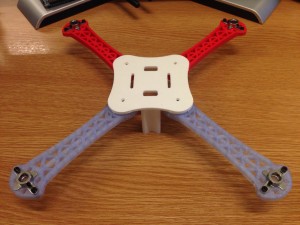
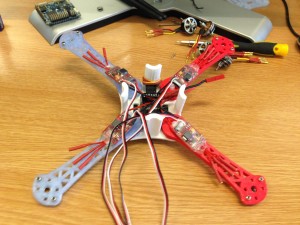
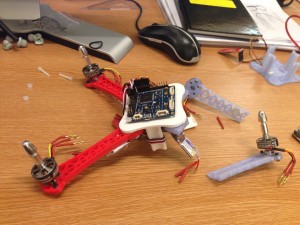
TEGO v3
Second version of 3D printed quadrotor, but 3rd version of TEGO. Using Rotites. Several configurations were built. Different range of motors. This version was used by lots of students, and its the most famous TEGO quadcopter. Some of them are in display in the James Watt Building.
This one fly’s autonomously using a MoCap system inside the MAST Lab.




Videos:

PROBLEM SOLVING
Fully solving problems by designing the Unmanned System from ground up, tailored specifically to the needs of the application to ensure maximum performance while keeping cost low. Applications like: object tracking, realtime object recognition and so forth.
DRONE CONSULTING
With our deep knowledge and experience in the Unmanned Systems Industry we can advice you on how to use drones in the best way regardless your application. Aerial photography, mapping, inspection among others.