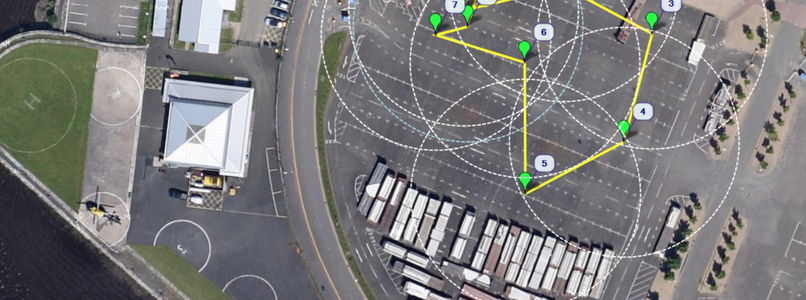
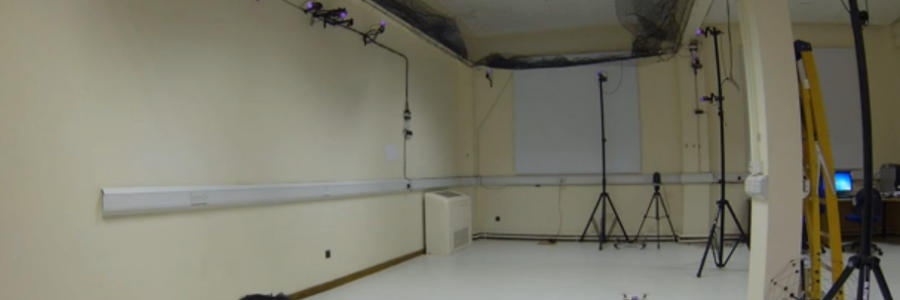
For my project I need to design and build a two axis mechanical gimbal… A gimbal is a pivoted support that allows the rotation of a object on a axis, in this case, the object it will be a laser and a camera, and it will allow them to move in two axis, with the purpose of tracking and pointing a multicopter on flight. The gimbal will be part of the ground station.
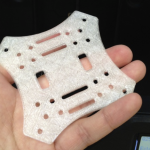
Fortunately I received help from a very special person (TEGO), nothing more and nothing less than an excellent industrial designer, hehehe, so, after dealing with all the STL files, corrections and adjustments, we proceed to the printing stage.
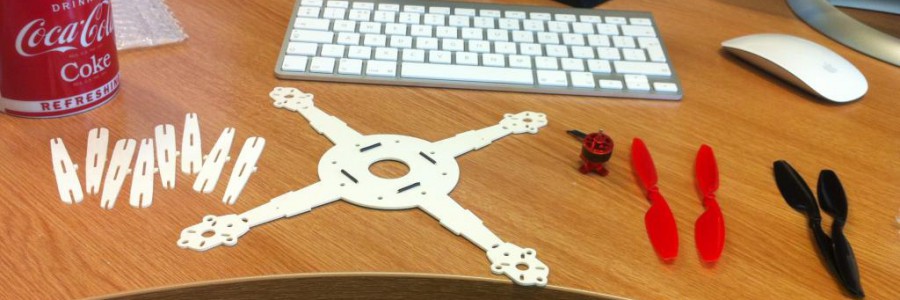
I must say that this stage was really really difficult, the Replicator 2 wasn’t cooperative enough, lots of material and man-hours were lost. After a very nice conversation with the excellent technical support of Makerbot, they send me (free of charge) a extruder upgrade for my Replicator 2. After waiting 1 week to arrive (meanwhile I was being attack by swans on Loch Ness BTW) I proceed to “upgrade” my replicator and voila!!!! it worked perfectly!!! I was able to print again all the gimbal parts with close to little effort.


And then proceed to test the controller and the hardware, in the video you will see the gimbal being stabilised by a IMU and some open-source software, and I’m happy to say that, is working. So, the next step is to start flying things above the gimbal and see if its capable of keep pointing and tracking.
Aldux out.