The GoPro is a camera originally design to take videos… but, you can definitely take very cool pics with it, make the most of that excellent 12MP lens!!!
The GoPro has no screen or viewfinder so you have no idea what you’re going to get in the frame when composing your shots. So you really need to “get used” to shot without viewing, in the first shoots everything goes bad… as some of the pictures on the bottom, but with more experience everything becomes better, and also there is the possibility to take vertical pics, just turn 90 degrees the GoPro and start snapping some people, the results are rad and you’ll catch more of the action. Rotate it in post on the computer. * Tip * Aim the center of the camera at your waist if you’re doing selfies – the wide angle lens will capture your feet and head with plenty of space.
After some videos and getting more comfortable flying the quadrotor, I put a nice GoPro Hero 3 camera on top of the quadrotor and make a wee flight… Everything go according to plan…
Selfie
GoPro Hero 3
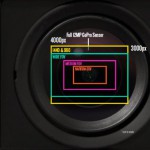
GoPro lens
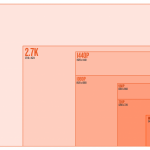
The GoPro is a awesome camera, with some great characteristics. Capable of capturing digital video up to 4K and 2.7K resolution. Frame rate is lowered to 15 frames per second when capturing at 4K resolution. 4K is a resolution of 3840 pixels × 2160 pixels.
For those owners of a GoPro, I really recommend to read this excellent post.
After building and testing AlduxQuad (showed on past R&D post here), I perform the first maiden flight…
The maiden flight of an aircraft is the first occasion on which an aircraft leaves the ground under its own power. This is similar to a ship’s maiden voyage. The first flight of a new aircraft type is always a historic occasion for the type. It is also one of the most dangerous, because the exact handling characteristics of the aircraft are generally unknown. The first flight of a new type is almost invariably flown by a highly experienced test pilot, not like me obviously hehehe 😉
But, the good part is that… no crashes at all!!! (yet)
Since I was really young I always wanted to have and fly a radio controlled (RC) helicopter, but of course, it was reallly really expensive, and super difficult to get for a 11 year old boy… so, for years I waited and saved money… When I was close to 17 or 18 (I don’t really remember) I was able to get enought money to buy my first helicopter.
I bought it in mercadolibre.com, a service very similar to eBay, of course it was used, but in very nice condition.
RC helicpoters are model aircraft which are distinct from RC airplanes because of the differences in construction, aerodynamics, and flight training. Several basic designs of RC helicopters exist, of which some (such as those with collective pitch, meaning blades which rotate on their longitudinal axis to vary or reverse lift so the pitch can be altered and can therefore change the angle of attack) are more maneuverable than others. The more maneuverable designs are often harder to fly, but benefit from greater aerobatic capabilities.
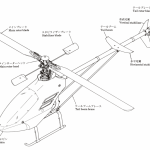
Diagram
Engine
Manual
Hovering…
I buy a HIROBO GPH 346, with a nitro engine (not to be confused with gas, or gasoline powered helicopters) have been made in several sizes over the years. These are referred to as the “class” of the helicopter. They include 1/2A class, 15 class, 30 class, 50 class, 60 class and 90 class. These class numbers originated from the size of engine (engine displacement measured in cubic inches) used in the different models. For example, a helicopter with a .30 cubic inch engine is a “30 class” and a helicopter with a .90 cubic inch engine was referred to as a “90 class” helicopter. The bigger and more powerful the engine, the larger the main rotor blade that it can turn and hence the bigger the aircraft overall. Typical flight time for nitro helicopters is 7–15 minutes depending on the engine size and tuning. The GPH 346, had a OS 46FX-H engine, so 46 class.
I started by hovering it, only lifting it from the ground like 5-10 centimeters, like the one showed on the slideshow…
Unfortunately, I crashed a couple of times… and that was enough to don’t have enough money to buy replacement parts 🙁
Its super difficult to try to flight one of this things… hahahaha
Unmanned Aerial Vehicles (UAV’s) have become an increasingly area of study in the last years. This kind of vehicle does not require a human pilot to be physically present inside the aircraft which allows it to be used in dangerous situations or in hazardous environments (such as disaster areas). An specific class of these aerial vehicles know as quad-rotors (aircraft with 4 rotors) which are specially researched because of its capacity for hovered flights.
This part of the report proposes the design and test of an UAV quad-rotor prototype capable of act as a particle in a swarm of robots. Its important to mention that the embedded systems also know as avionics is based on popular DIY (do it yourself), open-hardware systems available to buy everywhere, we have bench-tested 3 of those systems.
Sketch
Frame, nuts and bolts
Assembly 1
Assembly 2
Almost ready to test
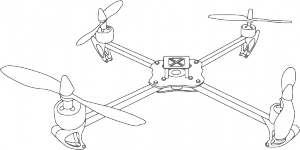
AlduxQuad is my second quadcopter built and the first documented one.
The frame is made from aluminium (550mm from rotor to rotor), two arms are black and the rest are red, just to have a better view of the X when flying.
Brushless motors don’t have the mechanisms necessary to rotate by itself so to make them rotate is necessary to use a device to energize each phase to generate the rotation correctly, hence the ESC’s. This motors are commonly chosen by their Kv rating. This rating refers to the rpm constant of the motor, is the number of revolutions per minute that the motor will turn when 1 volt is applied with no load attached to the motor. Is important to note that Kv does not have nothing to do with Kilovolt, is just a common way of referring to the constant by the manufacturers. Its more related to the power out of the motor, the torque level of it, its determined by the number of winds in the armature and the strength of the magnets, is a value that is always delivered by the manufacturer.
It’s important to mention that adjacent motors in the quad-rotor rotates on opposite directions. This is necessary because the total centripetal force generated by the rotation of the motors would make the quad-rotor rotate in the opposite direction to the rotation of the motors. Four propellers are used, two propellers for clockwise rotation and two for counter clockwise. The adjacent propellers have opposite attack angles because the clockwise motor demands clockwise propellers and the counter clockwise motor demands counter clockwise propellers.
I choose Turnigy brushless motors with 1050kv and a max current of 19amps.
The correct motor/prop combination needs to be chosen by considering the size and weight of the quad-rotor, the length of flying time and the power and agility desired. Propellers are listed by length and pitch typically ranging from 8 inches for higher Kv motors to as long as 12 inches for lower Kv motors. The size used in the actual quad-rotor are 10 inches with a 4.5 pitch because we selected a middle Kv motor.
The LiPo is a rechargeable battery that has the characteristics like high drive electrical current capacity, high charge storage capacity, several charge-discharge cycles. This batteries are chosen by 3 factors: power (amperes); the number of cells (voltage, each cell delivers 3.7 volts); discharge rate (its the capacity to discharge).
I have tested mainly 2 IMU autopilots that are available in the market today, the suggested platforms have similar structures, one is the Ardupilot (APM) and the other is MultiWii flight controller (MW).